- Álgebra Booleana e Circuitos Lógicos
- Diagrama de Blocos
- Eletrônica Digital na Engenharia Eletrônica
- Sistemas de Controle
Um sistema dinâmico linear, causal e invariante no tempo, é modelado pela função de transferência G (s) =  , no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
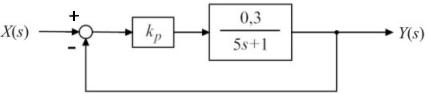
Considerando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganhoConsiderando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.