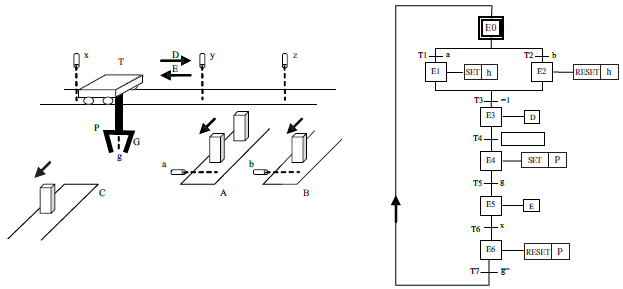
O sistema de transferência de peças da figura é composto por duas esteiras de entrada (A e B), uma garra (G) alojada num carro sobre trilhos (T) e uma esteira de saída (C). Os sinais binários referentes aos atuadores e sensores do sistema são:
| D | Aciona motor que move o carro para a direita. |
| E | Aciona motor que move o carro para a esquerda. |
| P | Fecha a garra para suspender uma peça. |
| x | Sensor de presença do carro sobre a esteira C (posição de repouso). |
| y | Sensor de presença do carro sobre a esteira A. |
| z | Sensor de presença do carro sobre a esteira B. |
| g | Sensor de presença de peça na garra. |
| a | Sensor de presença de peça na esteira A. |
| b | Sensor de presença de peça na esteira B. |
Quando uma peça é detectada numa das esteiras de entrada, o carro, inicialmente na posição de repouso, movimenta-se até a esteira e suspende a peça com a garra. A peça é, então, transportada para a esteira C, onde é liberada pela garra para ser evacuada. A figura também mostra o Grafcet de comando para o sistema de transporte.
A variável h tem a função de fazer com que o carro siga até a esteira A ou B, dependendo do sinal de detecção de peça recebido.
O Grafcet apresentado possui o problema de permitir que se acumulem peças numa das esteiras, em função de um atendimento que prioriza a presença de peças na outra esteira.
As modificações das receptividades para as transições T1 e T2 que evitam esse problema são, respectivamente: