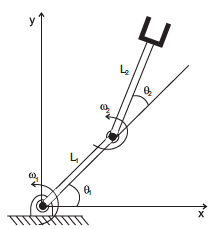
Considere o manipulador robótico com dois braços, duas juntas rotacionais com velocidades constantes !$ ( \omega_1 \,\, e \,\, \omega_2) !$ e uma garra, em uma configuração !$ (\theta_1 \,\, e \,\, \theta_2) !$ qualquer.
A velocidade linear da garra, em m/s, para L1 = 0,5 m, L2 = 1,0m, !$ \omega_1 !$ = 10 rad/s e !$ \omega_2 !$ = 10 rad/s, !$ \theta_1 !$ = 0º e !$ \theta_2 !$ = 90º é: