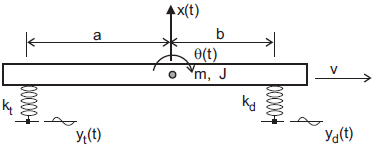
A figura acima mostra um modelo simplificado de dois graus de liberdade para um veículo plano, onde os efeitos das suspensões e dos pneus do veículo são representados por molas equivalentes, e os graus de liberdade referem-se aos movimentos de translação vertical x(t) e de rotação !$ θ !$(t). As excitações de base !$ y_t(t) !$ e !$ y_d(t) !$ representam as irregularidades da pista. Considere que !$ k_t = k_d !$ e !$ a ≠ b !$.
O modelo linear de veículo assim idealizado