Foram encontradas 859 questões.
Os métodos de posicionamento RTK (Real Time Kinematic) e DGPS (Differential GPS) são executados pela transmissão instantânea de dados de correções dos sinais de satélites, do(s) receptor(es) instalado(s) no(s) vértice(s) de referência, ao(s) receptor(es) que percorre(m) os vértices de interesse (rover). A diferença básica entre o método RTK e o método DGPS é que:
Provas
Considere as afirmativas abaixo e indique V para verdadeira e F para falsa.
( ) O posicionamento relativo estático rápido é similar ao relativo estático, porém, a diferença básica é a duração da sessão de rastreio, que, no primeiro caso, é inferior a 20 minutos.
( ) O posicionamento relativo estático rápido é uma transição entre o estático e o cinemático. O receptor que ocupa o vértice de interesse permanece estático, porém num tempo de ocupação bastante curto, necessitando coletar dados no deslocamento entre um vértice de interesse e outro.
( ) No posicionamento relativo cinemático, enquanto um ou mais receptores estão estacionados no(s) vértice(s) de referência, o(s) receptor(es) que coleta(m) dados dos vértices de interesse permanece(m) em movimento. A cada instante de observação, que coincide com o intervalo de gravação, é determinado um conjunto de coordenadas.
Assinale a alternativa correta.
Provas
As ocorrências de deslizamentos em maciços rochosos estão frequentemente associadas à presença de descontinuidades, que têm como principal propriedade relacionada a essas ocorrências:
Provas
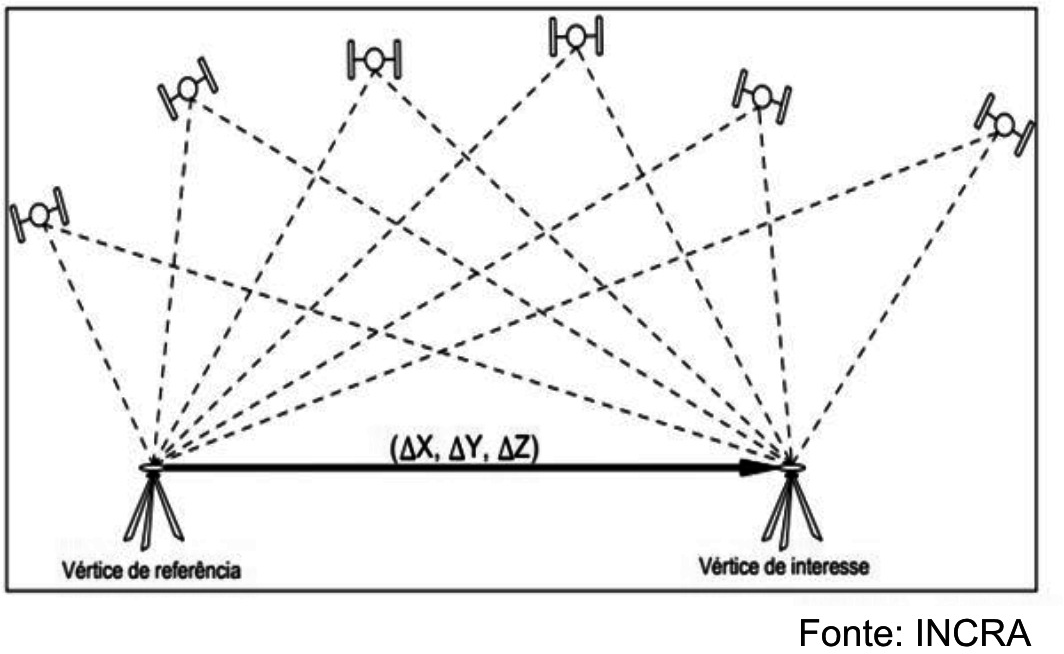
A figura abaixo representa um método de levantamento conhecido como:
Provas
As voçorocas ou boçorocas são feições erosivas geradas por:
Provas
O sistema GNSS criado por meio do esforço de alguns países europeus e de seus colaboradores, como por exemplo, Canadá e Japão, sob o controle e responsabilidade civil, sendo a ESA (European Space Agency) uma das instituições responsáveis pelo seu desenvolvimento, é denominado:
Provas
Dentre os tipos de movimentos de massa catastróficos que ocorrem no Brasil, assumem muito destaque as chamadas corridas de detritos, que são causadas:
Provas
O posicionamento com GPS está sujeito a degradações provocadas por algumas fontes de erros. Tais erros podem ser reunidos em quatro grupos: satélite, propagação do sinal, receptor/antena e estação. A refração ionosférica e a variação do centro de fase da antena são erros cujas fontes são, respectivamente:
Provas
Atualmente, os satélites transmitem sinais continuamente em frequências da banda L e sobre essas frequências são modulados a mensagem de navegação e os códigos pseudoaleatórios (PRN – Pseudo Randon Noise). São exemplos de frequências na banda L utilizadas pelo sistema GPS:
Provas
A percolação de água no interior dos solos sofre influência do grau de saturação, de modo que:
Provas
Caderno Container