O instrumental utilizado nos serviços de topografia deve sofrer revisões constantes, principalmente após os serviços de longa duração. Dando sequência ao tema, leia as sentenças abaixo e assinale a alternativa incorreta.
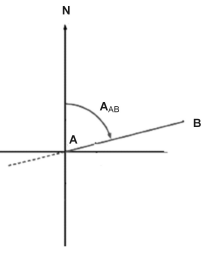
A exploção de todas as potencialidades do GPS num dado território exige conhecimento detalhado das ondulações do geoide, relativamente ao WGS84, nesse território, visto que o GPS mede altitudes geodésicas relativas ao elipsoide de referência do WGS84, e não altitudes ortométricas. Diante do exposto, é correto afirmar que o geoide, assim como a rede
A tomada das fotografias aéreas obedece a um meticuloso planejamento. Uma série de medidas são adotadas para que se possa realizar um vôo de boa qualidade. Sobre o tema vôo fotogramétrico, leia as sentenças abaixo e assinale a alternativa correta.
I- O vôo é realizado após um completo planejamento da operação, que é resultante de um estudo detalhado com todas as especificações sobre o tipo de cobertura a ser executado.
II- Um projeto de recobrimento é um estudo detalhado, com todas as especificações sobre o tipo de cobertura. Sendo desnecessária, portanto, a consulta ao mapa climatológico.
Leia a sentença abaixo e preencha a lacuna assinalando a alternativa correta.
“________________ - é o conjunto de fotos de uma determinada área, recortadas e montadas técnica e artísticamente, de forma a dar a impressão de que todo o conjunto é uma única fotografia.”
A NBR 13133 classifica os níveis, segundo o desvio padrão de 1 km de duplo nivelamento. Um nível que tem o desvio padrão menor ou igual a 3mm/km é classificado como:
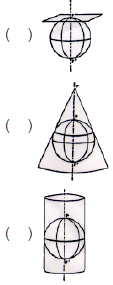
As projeções cartográficas podem ser classificadas de acordo com diversas metodologias, buscando sempre um melhor ajuste da superfície a ser representada. Associe as colunas, relacionando a posição de superfície às respectivas imagens. A seguir, assinale a alternativa que apresenta a sequência correta.
Sobre um mapa de uma propriedade agrícola, escala 1:10.000, precisa-se demarcar uma área de reserva florestal de 25,00 ha. Assinale a alternativa que apresenta o tamanho dessa área, se for quadrada, no mapa.