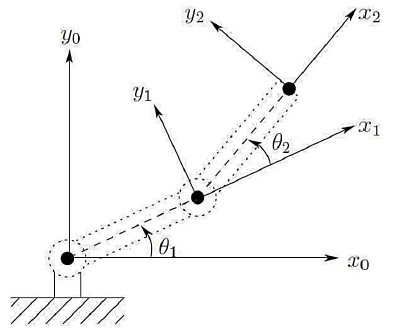
Considere um robô planar de dois graus de liberdade, composto por dois elos de comprimentos L1 = 2 e L2 = 2. O desenho simplificado do robô é ilustrado abaixo:
Para que o órgão terminal (end effector) atinja a posição (2,2) no plano XY, determine qual conjunto de ângulos (em graus) corresponde à solução da cinemática inversa, considerando a configuração de "cotovelo para baixo".
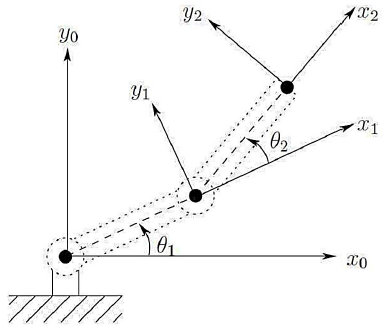
Considere um robô planar composto por dois elos e dois eixos rotacionais, operando no plano XY, conforme o desenho abaixo:
Na representação de Denavit–Hartenberg, os parâmetros para cada link são definidos pelos quatro valores:
ai: comprimento do elo (distância entre os eixos zi e zi+1 medidos ao longo do eixo xi).
\( \alpha_i \): ângulo entre os eixos zi e zi+1 medido em torno de xi.
di: deslocamento ao longo do eixo zi.
\( \theta_i \): ângulo de rotação em torno do eixo zi.
Para um robô planar com dois graus de liberdade, onde os eixos são rotacionais e os elos operam no plano (portanto, sem deslizamento no eixo z), a representação clássica, que apresenta corretamente os parâmetros de Denavit–Hartenberg para esse robô planar, está apresentada na alternativa:
A fabricação de peças por impressão 3D com filamentos
termoplásticos se tornou acessível e possibilitou a prototipagem rápida de objetos com geometria complexa.
A prototipagem rápida permite iterar sobre geometrias
e materiais diferentes para obter estruturas otimizadas.
Porém, para aplicações nas quais a peça é submetida à
esforços mecânicos, a orientação da impressão se torna
relevante, resultando na resistência dependente da direção e sentido do esforço. Esse fenômeno é chamado de
Assinale a alternativa que indica, correta e respectivamente, qual a tecnologia de impressão utilizada pela
Stratasys J850 e qual o tipo de material utilizado na
impressão.
A impressão 3D possibilita a fabricação de peças com
alta complexidade geométrica. Contudo, algumas peças
necessitam de materiais de suporte para viabilizar sua
impressão, sendo necessária a remoção desse material
posteriormente. Em um contexto de automação industrial e
considerando as especificidades da impressora Stratasys
J850, qual é o método mais indicado para a remoção dos
materiais de suporte sem qualquer intervenção manual?