Foram encontradas 40.885 questões.
No processo de soldagem com eletrodo revestido com diâmetro de 4 mm e revestimento semiespesso a intensidade de corrente recomendada é de
Provas
No processo de soldagem MIG, utiliza-se um arame eletrodo consumível, bem como um gás inerte para proteção da região de soldagem, que é denominado:
Provas
Na operação de desmontagem de uma máquina para reparação, o primeiro procedimento do técnico deve ser
Provas
Na soldagem de peças de ferro fundido, recomenda-se um preaquecimento de, aproximadamente, 200 ºC, com a finalidade de
Provas
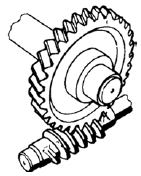
O conjunto de engrenagens na imagem, utilizado em máquinas para reduzir velocidades e multiplicar forças na transmissão de movimento, é corretamente conhecido por:
Provas
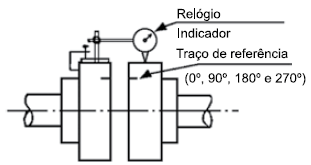
Observe a operação que está sendo efetuada durante a montagem de máquina na imagem a seguir e assinale a alternativa correspondente.
Provas
Na montagem de máquinas, é comumente utilizado um dispositivo simples de lubrificação, composto de bomba ou apenas de um recipiente com bico, conhecido por
Provas
Na aplicação de óleo lubrificante, para evitar que a película da lubrificação seja rompida, é necessário que o lubrificante apresente nível adequado de
Provas
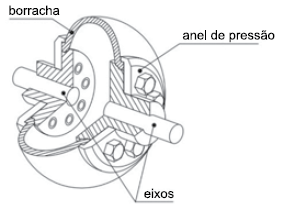
Para manter eixos de mecanismos conectados longitudinalmente na transmissão de movimentos de rotação, são utilizados acoplamentos, tais como o tipo apresentado na imagem, que permite
Provas
Na transmissão de esforço e rotação por polias e correias, para ajustar as correias nas polias, mantendo a tensão correta de trabalho, utiliza-se o
Provas
Caderno Container