Foram encontradas 40.885 questões.
Nos elementos de máquinas que fazem movimentos rotativos e retilíneos alternativos, no que se refere à ligação mecânica, deve-se utilizar a chaveta tipo
Provas
Para identificar a folga, intensidade de ruídos e vibrações de desgastes de rolamentos recomenda-se utilizar
Provas
Observe o desenho mecânico a seguir, identifique o tipo de rolamento e assinale a alternativa correspondente.
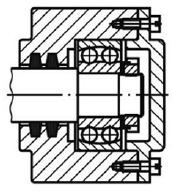
Provas
O rolamento mais comum produzido para suportar pequenas e grandes cargas axiais com rotações elevadas é denominado
Provas
O instrumento muito utilizado em várias atividades conforme imagem a seguir tem como finalidade
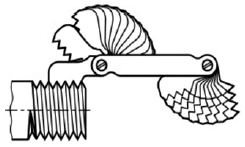
Provas
No perfil básico de rosca padrão métrico, a distância entre os filetes conforme imagem é denominada:
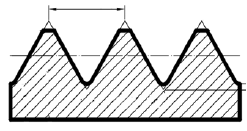
Provas
O processo de produção utilizado para obtenção de superfícies de revolução em que normalmente a peça gira no eixo principal de rotação da máquina e a ferramenta se desloca simultaneamente em trajetórias específicas é denominado
Provas
Os processos de produção de peças por estampagem profunda utilizam ferramentas acionadas por
Provas
Extrusão é um processo de conformação plástica por meio da aplicação de altas tensões de compressão, com o objetivo de
Provas
O processo de fabricação que proporciona uma significativa redução da seção da largura e, assim, o consequente aumento no comprimento do material, conforme imagem, é conhecido por
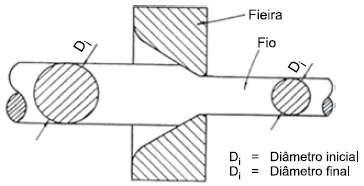
Provas
Caderno Container