Foram encontradas 40 questões.
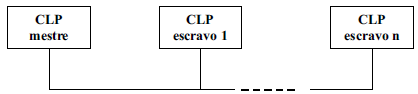
Um CLP X possui capacidade de troca de dados numa rede do tipo mestre-escravo, como mostra a figura. O CLP mestre faz uma varredura cíclica em todos os CLPs escravos da rede, realizando o intercâmbio de dados. A comunicação por rede permite que os CLPs compartilhem variáveis entre si. O ciclo de varredura de rede é independente do ciclo interno de varredura dos CLPs, que é composto pelas seguintes etapas:
1) Atualização da memória de entrada e saída local.
2) Atualização da memória de dados referentes à rede.
3) Execução do programa de aplicação do usuário.
Na etapa 2 do ciclo de varredura do CLP, os dados recebidos por uma comunicação de rede são atualizados na memória e os dados referentes aos outros CLPs são repassados para transmissão. As trocas de dados entre diferentes estações escravas são feitas por intermédio do CLP mestre. Os tempos estimados para a rede da figura são:
|
Tempo de sensibilização de uma entrada local do CLP X |
TI |
|
Tempo de sensibilização de uma saída local do CLP X |
TO |
|
Tempo de varredura da rede |
TR |
|
Tempo de varredura do CLP mestre |
TM |
|
Tempo de varredura do CLP escravo i (i = 1, ..., n) |
TEi |
Considere a figura abaixo:
A ligação em rede do CLP X também permite uma configuração de entrada e saída remota, onde apenas o CLP mestre executa o programa de aplicação do usuário e os CLPs escravos simplesmente disponibilizam as suas entradas e saídas ao CLP mestre pela rede.
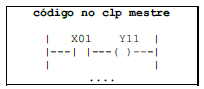
Numa comunicação mestre-escravo, em modo de entrada e saída remota, ilustrada na figura, o CLP mestre recebe um estímulo na entrada, correspondente ao ponto X01, que provoca uma modificação na saída correspondente ao ponto Y11 do CLP escravo 1.
A estimativa correta do tempo de transmissão deste estímulo da entrada do mestre para a saída do escravo 1 é:
Provas
Um CLP X possui capacidade de troca de dados numa rede do tipo mestre-escravo, como mostra a figura. O CLP mestre faz uma varredura cíclica em todos os CLPs escravos da rede, realizando o intercâmbio de dados. A comunicação por rede permite que os CLPs compartilhem variáveis entre si. O ciclo de varredura de rede é independente do ciclo interno de varredura dos CLPs, que é composto pelas seguintes etapas:
1) Atualização da memória de entrada e saída local.
2) Atualização da memória de dados referentes à rede.
3) Execução do programa de aplicação do usuário.
Na etapa 2 do ciclo de varredura do CLP, os dados recebidos por uma comunicação de rede são atualizados na memória e os dados referentes aos outros CLPs são repassados para transmissão. As trocas de dados entre diferentes estações escravas são feitas por intermédio do CLP mestre. Os tempos estimados para a rede da figura são:
| Tempo de sensibilização de uma entrada local do CLP X |
TI |
| Tempo de sensibilização de uma saída local do CLP X |
TO |
| Tempo de varredura da rede |
TR |
| Tempo de varredura do CLP mestre |
TM |
| Tempo de varredura do CLP escravo i (i = 1, ..., n) |
TEi |

Numa comunicação escravo-escravo, ilustrada na figura, o CLP escravo 1 recebe um estímulo na entrada correspondente ao ponto X11, que atualiza o ponto C01 do CLP mestre. No CLP mestre, a atualização do ponto C01 provoca uma modificação no ponto C21 do CLP escravo 2. Por fim, no CLP escravo 2, a atualização do ponto C21 provoca a modificação do ponto Y21, que corresponde a uma saída. A estimativa correta do tempo de transmissão deste estímulo da entrada do CLP escravo 1 para a saída do CLP escravo 2 é:
Provas
Diagrama de Bode
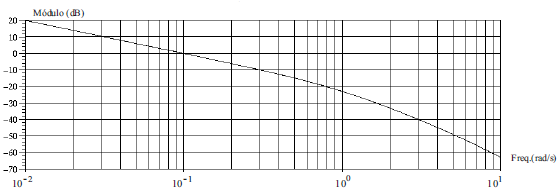
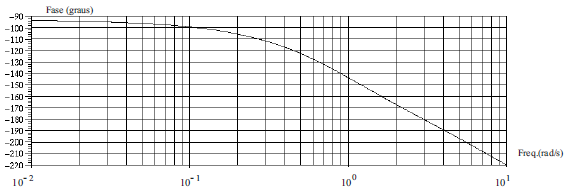
As figuras apresentam os diagramas de Bode para a função de transferência em malha aberta de um determinado sistema físico. A margem de ganho, em dB, e a margem de fase, em graus, valem, respectivamente:
Provas
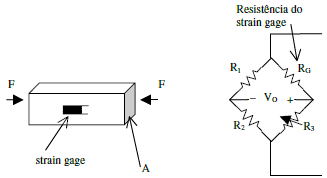
A figura acima mostra a utilização de um strain gage para a medida da deformação elástica de uma barra prismática submetida a um esforço de compressão. A barra é constituída por um material que possui módulo de Young E e o strain gage possui fator gage K, especificados abaixo. Liga-se o strain gage a um circuito em ponte, alimentado por uma tensão VI = 12V, como indicado na figura. Na ponte, R1 = R2 e R3 é ajustado para anular a tensão de saída VO, quando não há esforço sobre a barra.
Dados e especificações técnicas:
|
E |
módulo de Young !$ E \, = \, \dfrac {\dfrac {F} {A}} {\dfrac {\Delta l} {l}} \, = \, 7 x 10^{10} \,\, N / m^2 !$ |
|
F |
módulo da força aplicada na direção longitudinal (N) |
|
A |
área da seção transversal da barra, valor dado: A = 2x10-3 m2 |
| !$ \dfrac {\Delta l} {l} !$ |
deformação elástica da barra (adimensional) |
|
K |
fator gage !$ K \, = \, \dfrac {\dfrac {\Delta R_G} {R_G}} {\dfrac {\Delta l} {l}} \, = \, 2 !$ (adimensional) |
| !$ \dfrac {\Delta R_G} {R_G} !$ |
razão entre a variação da resistência do strain gage com a aplicação da força !$ (\Delta R_G \,\,\, em \,\,\, \Omega) !$ e sua resistência de repouso !$ (R_G \,\,\, em \,\,\, \Omega) !$ |
O módulo da força F, em N, quando a tensão VO vale 1V é:
Provas
Disciplina: TI - Desenvolvimento de Sistemas
Banca: CESGRANRIO
Orgão: Transpetro
Um programador necessita fazer um algoritmo para manipular alguns dados numéricos disponíveis em uma matriz C. Existem dois vetores, A e B, de mesma dimensão N, cujos elementos numa mesma posição indicam, respectivamente, a linha e a coluna do dado a ser manipulado na matriz C. Se o número da linha for diferente do número da coluna, o algoritmo deve verificar se o dado correspondente na matriz C é maior que zero. Nesse caso, o dado deverá ser trocado com o elemento da posição transposta na matriz C. Em caso contrário, isto é, se o número da linha for igual ao da coluna ou se o dado na matriz C for menor ou igual a zero, então o dado deverá ser multiplicado por 10.
O programador escreveu, em pseudocódigo, o seguinte algoritmo:
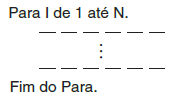
Assinale a opção que apresenta as linhas que estão faltando no programa, em pseudocódigo, para o seu correto funcionamento.
Provas
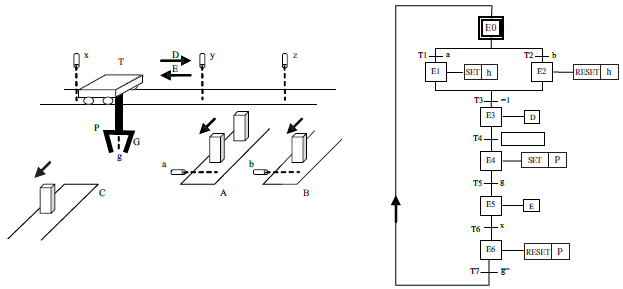
O sistema de transferência de peças da figura é composto por duas esteiras de entrada (A e B), uma garra (G) alojada num carro sobre trilhos (T) e uma esteira de saída (C). Os sinais binários referentes aos atuadores e sensores do sistema são:
| D | Aciona motor que move o carro para a direita. |
| E | Aciona motor que move o carro para a esquerda. |
| P | Fecha a garra para suspender uma peça. |
| x | Sensor de presença do carro sobre a esteira C (posição de repouso). |
| y | Sensor de presença do carro sobre a esteira A. |
| z | Sensor de presença do carro sobre a esteira B. |
| g | Sensor de presença de peça na garra. |
| a | Sensor de presença de peça na esteira A. |
| b | Sensor de presença de peça na esteira B. |
Quando uma peça é detectada numa das esteiras de entrada, o carro, inicialmente na posição de repouso, movimenta-se até a esteira e suspende a peça com a garra. A peça é, então, transportada para a esteira C, onde é liberada pela garra para ser evacuada. A figura também mostra o Grafcet de comando para o sistema de transporte.
A variável h tem a função de fazer com que o carro siga até a esteira A ou B, dependendo do sinal de detecção de peça recebido.
O Grafcet apresentado possui o problema de permitir que se acumulem peças numa das esteiras, em função de um atendimento que prioriza a presença de peças na outra esteira.
As modificações das receptividades para as transições T1 e T2 que evitam esse problema são, respectivamente:
Provas
O sistema de transferência de peças da figura é composto por duas esteiras de entrada (A e B), uma garra (G) alojada num carro sobre trilhos (T) e uma esteira de saída (C). Os sinais binários referentes aos atuadores e sensores do sistema são:
| D | Aciona motor que move o carro para a direita. |
| E | Aciona motor que move o carro para a esquerda. |
| P | Fecha a garra para suspender uma peça. |
| x | Sensor de presença do carro sobre a esteira C (posição de repouso). |
| y | Sensor de presença do carro sobre a esteira A. |
| z | Sensor de presença do carro sobre a esteira B. |
| g | Sensor de presença de peça na garra. |
| a | Sensor de presença de peça na esteira A. |
| b | Sensor de presença de peça na esteira B. |
Quando uma peça é detectada numa das esteiras de entrada, o carro, inicialmente na posição de repouso, movimenta-se até a esteira e suspende a peça com a garra. A peça é, então, transportada para a esteira C, onde é liberada pela garra para ser evacuada. A figura também mostra o Grafcet de comando para o sistema de transporte.
A variável h tem a função de fazer com que o carro siga até a esteira A ou B, dependendo do sinal de detecção de peça recebido.
A expressão da receptividade para a transição T4 que leva ao correto funcionamento do sistema é:
Provas
Um sistema tem a sua entrada x(t) relacionada com a saída y(t), através da seguinte equação diferencial:
!$ \dfrac {d^2 y} {dt^2} \, + \, 5 \dfrac {dy} {dt} \, = \, 10 x (t) !$
Considerando todas as condições iniciais nulas e aplicando, neste sistema, uma realimentação de saída, com a lei de controle dada por x(t) = −Ky(t)+ r(t), a expressão da Função de Transferência relacionando a saída Y(s) e a entrada de referência R(s) é:
Provas
Considere a tabela abaixo:
|
Processo |
Ordem de Chegada |
Tempo estimado de execução (s) |
| A | 1 | 5 |
| B | 2 | 3 |
| C | 3 | 1 |
| D | 4 | 2 |
| E | 5 | 4 |
Cinco processos, nomeados A, B, C, D e E, chegam quase simultaneamente a um processador para serem executados.
Consideram-se desprezíveis as diferenças entre os tempos de chegada dos processos, porém a ordem de chegada está indicada na tabela. Os tempos de execução estimados dos processos são mostrados na tabela e o processador segue um algoritmo de escalonamento por ordem de chegada e com fatia de tempo de 1s.
O tempo médio de resposta aos processos, em segundos, é:
Provas
Num circuito elétrico, o sinal de tensão v(t), causal, é representado matematicamente pela expressão no domínio de Laplace:
!$ V(s) \, = \, \dfrac {10s \, + \, 20} {s^2 \, + \, 4s \, + \, 20} !$
Esta tensão tem a sua expressão no domínio do tempo, para !$ t \, \ge \, 0, !$ dada por:
Provas
Caderno Container