Foram encontradas 21.008 questões.
Considere a seguinte imagem do manual de fabricante, “Datasheet”, do controlador ESP32 - Séries (ESP32-D0WD, D0WDQ6, D2WD e S0WD) que descreve os endereços iniciais e finais dos diversos segmentos de memória interna integrada do ESP32:
| Category | Target | Start Address | End Address |
|
Embedded Memory |
Internal ROM 0 | 0x4000_0000 | 0x4005_FFFF |
| Internal ROM 1 | 0x3FF9_0000 | 0x3FF9_FFFF | |
| Internal SRAM 0 | 0x4007_0000 | 0x4009_FFFF | |
| Internal SRAM 1 | 0x3FFE_0000 | 0x3FFF_FFFF | |
| 0x400A_0000 | 0x400B_FFFF | ||
| Internal SRAM 2 | 0x3FFA_E000 | 0x3FFD_FFFF | |
| RTC FAST Memory | 0x3FF8_0000 | 0x3FF8_1FFF | |
| 0x400C_0000 | 0x400C_1FFF | ||
| RTC SLOW Memory | 0x5000_0000 | 0x5000_1FFF |
Sabe-se que a SRAM do ESP32 conta com 3 segmentos divididos em SRAM 0, SRAM 1 e SRAM 2 cujas capacidades de memória são, respectivamente:
Provas
Um sistema de comunicação analógica baseado em um receptor super-heteródino, tem seu diagrama de blocos dado por:
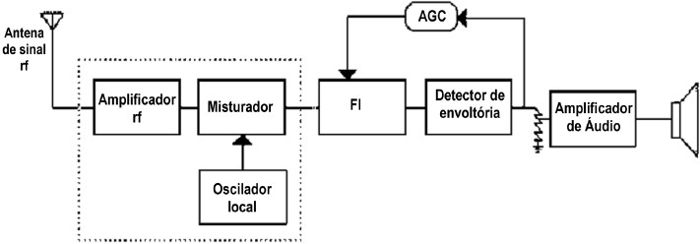
A ideia básica do sistema é que uma emissora qualquer, centrada na frequência fc seja captada pela antena e tenha seu sinal amplificado pelo amplificador rf na entrada. O misturador, através do oscilador local, ajusta a frequência fLO de tal maneira que apenas a referida emissora “atravesse” o filtro seletivo com frequência fIF. Para que este princípio básico seja satisfeito, a correlação destas frequências deve ser
Provas
Determine a alternativa que não se apresenta como característica, para uma fonte chaveada do tipo Flyback.
Provas
Considere o seguinte circuito RLC, descrito na figura a seguir.
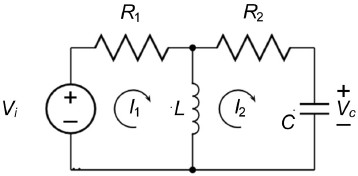
Admitindo as condições iniciais nulas no sistema, a função de transferência que correlaciona a tensão de entrada \( Vi \) com a tensão no capacitor \( Vc \), no domínio da frequência \( H(s) = Vc(s) / Vi(s) \) é expressa por
Provas
A resistência de um material fornece uma medida relativa à oposição ao fluxo de corrente elétrica de um determinado circuito. Em elementos ôhmicos, a variação relativa da resistência elétrica de um material em relação a alteração em sua temperatura é conhecida como coeficiente de temperatura (\( \alpha \)), e junto com a resistividade elétrica do material (\( \rho \)), pode ser utilizada para planejar equipamentos e instalações elétricas sob determinadas características específicas. A respeito do coeficiente de temperatura temos que o mesmo deve ser expresso em uma unidade de medida, identificada por
Provas
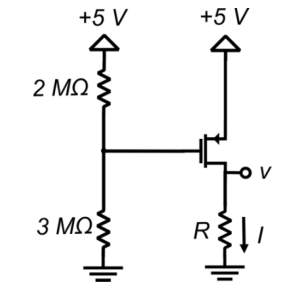
Considere o transistor PMOS tipo enriquecimento com tensão de limiar \( V \)\( t \) = −1 \( V \) e valor de \( k \)'\( p \) (\( W \)/\( L \)) = 1 \( m \)A/\( V \)2, mostrado no circuito abaixo. Qual o valor de resistência \( R \) para uma tensão V = +3 \( V \) e o maior valor de \( R \) para que o transistor se mantenha na região de saturação, respectivamente? Considere ainda a corrente I = 0,5 \( m \)A. Despreze qualquer efeito de modulação do comprimento do canal.
Provas
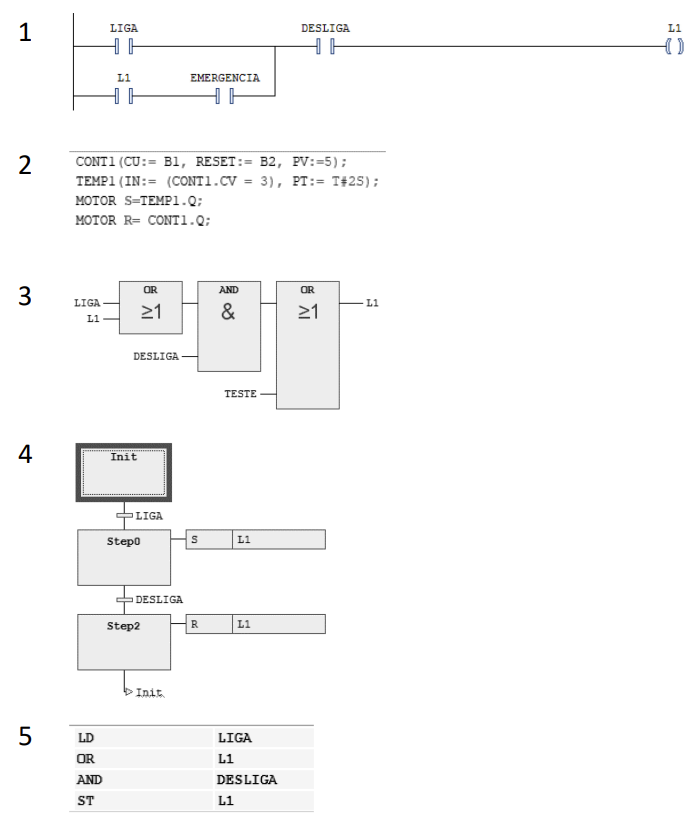
A Norma IEC 61131 define cinco linguagens de programação. Marque a opção que correlaciona CORRETAMENTE o trecho de código a sua respectiva linguagem de programação.
Provas
A Norma IEC 61131 estabelece o desenvolvimento de programas a partir da abordagem de cima para baixo e de baixo para cima, fundamentada por três princípios. Marque a opção que apresenta esses princípios:
Provas
Analisando o código, em linguagem C, pode-se afirmar que após a execução do código, os valores de a, b e c, serão respectivamente:
#include<stdio.h>
int main(void)
{
int a = 10;
int b = 15;
int c = 20;
if (a != b && c > a || !(b > a))
{
b = 80;
}
else
{
c = 0;
}
a = 40;
}
Provas
Deseja-se implementar um circuito digital para ligamento e desligamento de uma saída utilizando apenas uma entrada. Quando a entrada gerar um pulso, a saída ligará. Quando um novo pulso for gerado pela entrada, a saída desligará. O circuito que apresenta essa implementação é:
Provas
Caderno Container