Foram encontradas 855 questões.
Um motor CC de imã permanente gera uma força contra
eletromotriz a uma razão de 0,5 V/100 rpm e possui uma
resistência de armadura igual a 15Ω. O motor incialmente parado
é alimentado com 12V.
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
A corrente de armadura quando a velocidade é 1500 rpm é, em ampères:
Provas
Questão presente nas seguintes provas
Seja uma rede de Petri com os seguintes elementos:
• Conjunto de lugares: P = {p1,p2,p3,p4}
• Conjunto de transições: T = {a,b,c,d}
• Pré condições das transições:
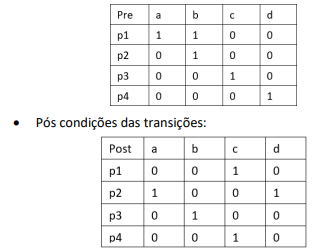
Considere que a rede está com uma marcação inicial p1 = 2, p2 = 0, p3 = 0 e p4 = 0, e disparam-se as transições a, b, c e d, em sequência e nesta ordem.
A marcação final da rede será
Provas
Questão presente nas seguintes provas
Um sensor de força utiliza-se de um potenciômetro linear atrelado
a uma mola. Deseja-se que a faixa de leitura deste sensor seja de
0 a F newtons, correspondendo a um deslocamento máximo do
conjunto de D centímetros, e que a sensibilidade seja S volts por
newtons. O potenciômetro movimenta-se linearmente solidário à
deformação da mola e sua resistência varia linearmente com seu
deslocamento e sua máxima excursão é de X centímetros, sendo
X > D.
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
A constante de mola, em newtons por centímetros, e a tensão de alimentação do potenciômetro, em volts, devem ser, respectivamente,
Provas
Questão presente nas seguintes provas
Considere o seguinte sistema SISO representado na forma de espaço de estados:
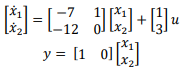
A representação deste mesmo sistema em função de transferência é
Provas
Questão presente nas seguintes provas
Um sistema com equação de estados:
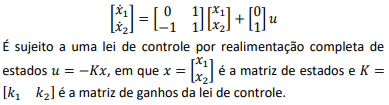
Os valores dos ganhos k1 e k2 para que o sistema em malha fechada tenha polos duplos em −2 são, respectivamente
Provas
Questão presente nas seguintes provas
Considere um controlador proporcional integral com função de
transferência D(s) = kp + ki/s em série com uma planta com função
de transferência G(s) = (s+2)/(s2 + 3s + 4) numa malha de
realimentação unitária negativa.
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é
O valor do ganho integral ki para que o erro em estado estacionário para uma entrada rampa unitária aplicada ao sistema em malha fechada correspondente seja de 0,1 unidades, é
Provas
Questão presente nas seguintes provas
Seja um compensador de avanço de fase com função de
transferência D(s) = (s + z)/(s + p), em que z e p são reais positivos
e, correspondem, respectivamente, às frequências de quebra do
zero e do polo do compensador na sua resposta em frequência,
avaliada em radianos por segundo.
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
O valor máximo da fase da resposta em frequência deste compensador encontra-se na frequência correspondente ao(à)
Provas
Questão presente nas seguintes provas
Considere o traçado do lugar das raízes para o sistema com função
de transferência G(s) = 1/(s3 + 6s2 + 25s) em série com um ganho
real positivo numa malha de realimentação unitária negativa.
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
O ponto de encontro das assíntotas do lugar das raízes encontra-se em
Provas
Questão presente nas seguintes provas
Considere a planta G(s) = 1/(s3 + 6s2 + 5s) em série com um ganho
proporcional kp positivo numa malha de realimentação negativa
unitária.
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
O valor do ganho kp para o qual a resposta livre do correspondente sistema em malha fechada apresente um comportamento oscilatório de amplitude constante é
Provas
Questão presente nas seguintes provas
Considere a expansão em frações parciais da função de
transferência G(s) = (s+5)/(s2 + 7s + 12) em termos de primeira
ordem da forma A1/(s+p1) + A2/(s+p2) em que -p1 e -p2 são os polos
de G(s) e A1 e A2 são os respectivos coeficientes dos termos da
expansão.
O valor do coeficiente correspondente ao polo de maior valor absoluto é
O valor do coeficiente correspondente ao polo de maior valor absoluto é
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container