Foram encontradas 855 questões.
Um sensor de temperatura gera uma tensão de saída (VO) em função da temperatura de exposição que pode variar de 0 °C a 100 °C. Sabe-se que na temperatura de 0 °C a tensão de saída do sensor é igual a 0 V e a taxa de variação da tensão VO é de 15 mV/°C.
Determine a tensão de saída para uma temperatura de exposição de 60 °C.
Provas
Observe o diagrama Ladder a seguir:
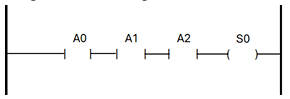
O tipo de circuito lógico representado correspondente a uma porta
Provas
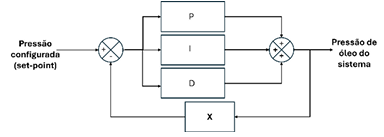
A partir do diagrama de blocos, de acordo com a teoria de controle PID, marque a opção que contém o componente correto a ser instalado no bloco indicado com a letra X.
Provas
Uma cremalheira é uma barra reta e dentada utilizada para converter o movimento de rotação de um motor em movimento linear. Quando se usa esse sistema, frequentemente é necessário delimitar a distância máxima do deslocamento realizado pela peça, a fim de evitar o desacoplamento do eixo do motor com a parte dentada da cremalheira. Essa delimitação é feita através de um acionamento por chave, indicando o ponto máximo de deslocamento permitido.
A chave utilizada para essa função é conhecida por
Provas
Considere os circuitos 1 e 2 representados a seguir:
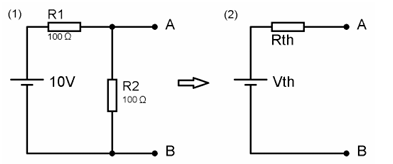
Calcule os parâmetros de equivalência de Thévenin do circuito 2, tensão e resistência de Thévenin (Vth e Rth), que uma carga perceberia se conectada entre os pontos A e B.
Provas
Um voltímetro digital (VM) foi utilizado para realizar a medida de tensão DC em um resistor, conforme ilustra o esquema da figura.
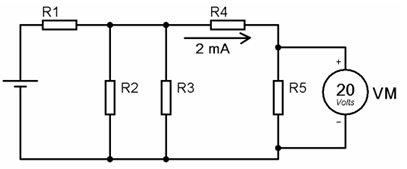
Analise o circuito e determine a resistência do resistor R5.
Provas
O controlador PID é um popular sistema utilizado na indústria para controlar grandezas como pressão, temperatura, vazão, entre outras.
Esse tipo de controle ocorre comumente em malha fechada, através de uma linha de realimentação (feedback) que tem a função de
Provas
A análise de circuitos elétricos e eletrônicos utiliza de diversas ferramentas para a solução de problemas. Dentre elas há um teorema que permite substituir um circuito linear de dois terminais por um circuito simplificado equivalente que se reduz a uma fonte de corrente e um resistor em paralelo.
O teorema descrito é conhecido por
Provas
Provas
O esquema apresentado a seguir é de um circuito RLC série com frequência central de ressonância em 100 kHz.
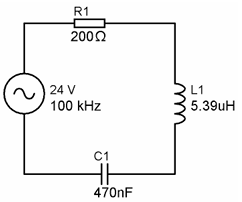
Observe os valores apresentados no esquema e determine impedância total do circuito.
Provas
Caderno Container